- Edited
- Best Answerset by Lethn

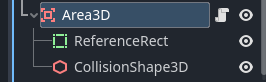
Ok. Here's the implementation that uses a convex collider for frustum. It needs some setup but it's not much. We use convenient ReferenceRect node for the selection rectangle. I kept the default node names for clarity. Rest of it is self evident I hope:
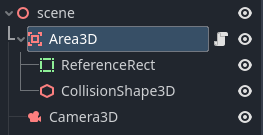
And here's the script attached to the area node. I commented it heavily:
extends Area3D
@export var camera: Camera3D
const near_far_margin = .1 # frustum near/far planes distance from camera near/far planes
# mouse dragging position
var mouse_down_pos: Vector2
var mouse_current_pos: Vector2
func _ready():
# initial reference rect setup
$ReferenceRect.editor_only = false
$ReferenceRect.visible = false
func _input(event):
if event is InputEventMouseButton and event.button_index == MOUSE_BUTTON_LEFT:
if event.is_pressed():
# initialize the rect when mouse is pressed
mouse_down_pos = event.position
mouse_current_pos = event.position
$ReferenceRect.position = event.position
$ReferenceRect.size = Vector2.ZERO
$ReferenceRect.visible = true
else:
$ReferenceRect.visible = false
# make a scelection when mouse is released
select()
if event is InputEventMouseMotion and event.button_mask & MOUSE_BUTTON_MASK_LEFT:
# set rect size when mouse is dragged
mouse_current_pos = event.position
$ReferenceRect.position.x = min(mouse_current_pos.x, mouse_down_pos.x)
$ReferenceRect.position.y = min(mouse_current_pos.y, mouse_down_pos.y)
$ReferenceRect.size = (event.position - mouse_down_pos).abs()
func select():
# get frustum mesh and assign it as a collider and assignit to the area 3d
$ReferenceRect.size.x = max(1, $ReferenceRect.size.x)
$ReferenceRect.size.y = max(1, $ReferenceRect.size.y)
$CollisionShape3D.shape = make_frustum_collision_mesh(Rect2($ReferenceRect.position, $ReferenceRect.size))
# wait for collider asignment to take effect
await get_tree().physics_frame
await get_tree().physics_frame
# actually get areas that intersest the frustum
var selection = get_overlapping_areas()
print("SELECTION: ", selection)
# YOUR CODE THAT DECIDES WHAT TO DO WITH THE SELECTION GOES HERE
# function that construct frustum mesh collider
func make_frustum_collision_mesh(rect: Rect2) -> ConvexPolygonShape3D:
# create a convex polygon collision shape
var shape = ConvexPolygonShape3D.new()
# project 4 corners of the rect to the camera near plane
var pnear = project_rect(rect, camera, camera.near + near_far_margin)
# project 4 corners of the rext to the camera far plane
var pfar = project_rect(rect, camera, camera.far - near_far_margin)
# create a frustum mesh from 8 projected points, 6 planes, 2 triangles per plane, 3 vertices per triangle
shape.points = PackedVector3Array([
# near plane
pnear[0], pnear[1], pnear[2],
pnear[1], pnear[2], pnear[3],
# far plane
pfar[2], pfar[1], pfar[0],
pfar[2], pfar[0], pfar[3],
#top plane
pnear[0], pfar[0], pfar[1],
pnear[0], pfar[1], pnear[1],
#bottom plane
pfar[2], pfar[3], pnear[3],
pfar[2], pnear[3], pnear[2],
#left plane
pnear[0], pnear[3], pfar[3],
pnear[0], pfar[3], pfar[0],
#right plane
pnear[1], pfar[1], pfar[2],
pnear[1], pfar[2], pnear[2]
])
return shape
# helper function that projects 4 rect corners into space, onto a viewing plane at z distance from the given camera
# projection is done using given camera's perspective projection settings
func project_rect(rect: Rect2, cam: Camera3D, z: float) -> PackedVector3Array:
var p = PackedVector3Array() # our projected points
p.resize(4)
p[0] = cam.project_position(rect.position, z)
p[1] = cam.project_position(rect.position + Vector2(rect.size.x, 0.0), z)
p[2] = cam.project_position(rect.position + Vector2(rect.size.x, rect.size.y), z)
p[3] = cam.project_position(rect.position + Vector2(0.0, rect.size.y), z)
return pAny Area3D node in the scene that intersects rect/frustum will be reported. So just assign the camera to our Area3D, put some colliders into the scene and you're good to go. I don't know if this can get any simpler.
The script now uses Godot's collision system to test for intersections between frustum and area colliders. The good thing is it can handle any collision shape. There are couple of drawbacks:
- It cannot discriminate between full and partial intersection. Every slight intersection will be reported.
- You need to wait for 2 physics frames (when triggered from the event callback) for newly replaced frustum collider to become active. If anyone knows a way to force it to be immediate - let us know.
I think my job in this thread is more than done  .
.
 . I looked at your code linked earlier and... well... you won't get far with your project doing things like this. Excessively long overexplaining names that repeat on and on aside, you treat you code merely as unstructured data storage. In coding we aim to automate and avoid repetition as much as possible. Otherwise you end up typing same things over and over. This is precisely what will happen to your project if you don't start approaching it from automation point of view. Let me give you an example. In your system you have several villager classes. In each class you define same properties. This is excessive by itself as you should use class inheritance to avoid code repetition. But that's only the start of problems. So in every villager class, amongst other things, you have:
. I looked at your code linked earlier and... well... you won't get far with your project doing things like this. Excessively long overexplaining names that repeat on and on aside, you treat you code merely as unstructured data storage. In coding we aim to automate and avoid repetition as much as possible. Otherwise you end up typing same things over and over. This is precisely what will happen to your project if you don't start approaching it from automation point of view. Let me give you an example. In your system you have several villager classes. In each class you define same properties. This is excessive by itself as you should use class inheritance to avoid code repetition. But that's only the start of problems. So in every villager class, amongst other things, you have: